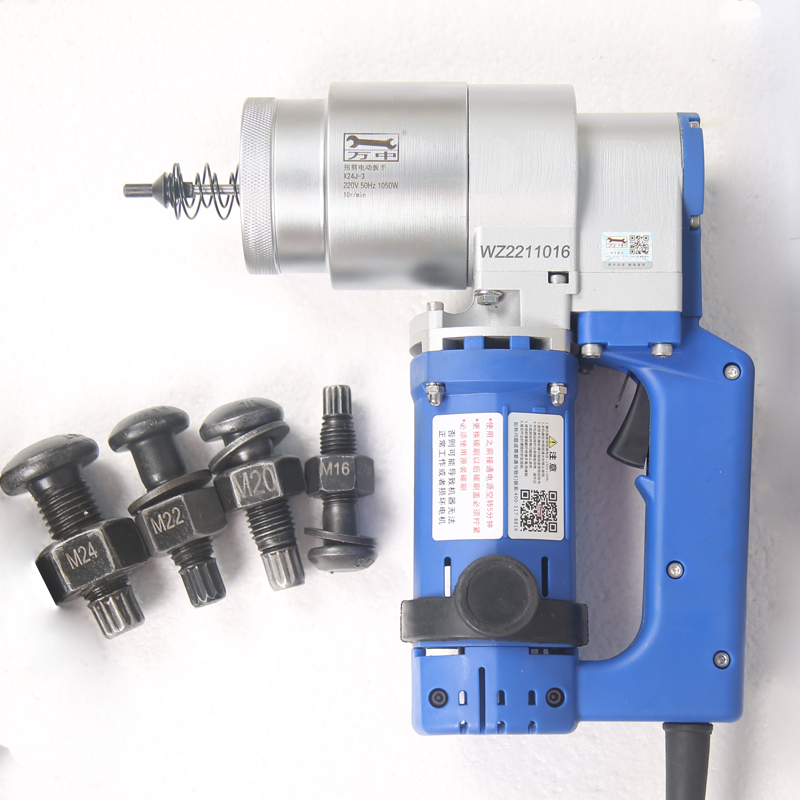
1�、力矩法:通常選用指針式扭力(測力)扳手或預(yù)置式扭力(定力)扳手�。當前用得多的是電動扭矩扳手。力矩法是經(jīng)過操控擰緊力矩來完成操控預(yù)拉力�����。擰緊力矩可由實驗斷定�����,應(yīng)使施工時操控的預(yù)拉力為描繪預(yù)拉力的1.1倍。當選用電動扭矩搬手時���,所需求的施工扭矩Tf為: 式中 Pf——施工預(yù)拉力����,為描繪預(yù)拉力1/0.9倍����;
k——扭矩系數(shù)均勻值,由供貨廠方給定���,施工前復(fù)驗;
d——高強度螺栓直徑��。
為了戰(zhàn)勝板件和墊圈等的變形�,根本板件之間的空隙,使擰緊力矩系數(shù)有較好的線性度��,然后前進施工操控預(yù)拉力值的正確度����,在裝置大六角頭高強度螺栓時�,應(yīng)先按擰緊力矩的50%進行初擰,然后按100%擰緊力矩進行終擰。關(guān)于大型節(jié)點在初擰之后��,還應(yīng)按初擰力矩進行復(fù)擰��,然后再行終擰����。
力矩法的長處是較簡略、易施行��、費用少����,但由于銜接件和被銜接件的外表和擰緊速度的區(qū)別��,測得的預(yù)拉力值差錯大且渙散�����,通常差錯為±25%�����。
2�、轉(zhuǎn)角法�����、先用一般扳手進行初擰����,使被銜接板件彼此嚴密貼合,再以初擰方位為起點����,按終擰視點,用長扳手或風(fēng)動扳手旋轉(zhuǎn)螺母�,擰該視點值時��,螺栓的拉力即到達施工操控預(yù)拉力�。